この動画を視聴するためには、
プレミアム会員登録が必要です。
プレミアム会員登録
プレミアム会員登録
購入ページ
00:00
00:00
広告 : (
)
この広告は
5
秒後にスキップできます
5
秒後にスキップできます
広告をスキップ
スキップする
プレミアム会員になると動画広告や動画・番組紹介を非表示にできます
3
本作品は権利者から公式に許諾を受けており、
広告の収益は権利者に還元されます。
(※プレミアム会員にも表示されます)
この動画は非公開に設定されています
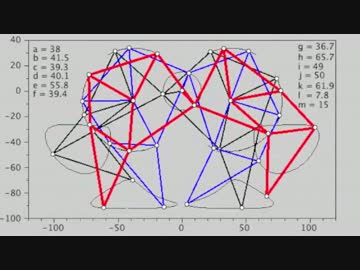
Scilabによるテオ・ヤンセン機構解析2
︙
2015/1/17
2015/1/17 5:00
投稿
993
993
3
3
7
7
ギフト
「いいね!」で動画を応援しよう!
いいね!
ランキング最高順位:
-
詳細
Scilabで今度はいろんなリンク長にしてみました
適当に9種類ほどやってみました
解析はMATLABクローンのScilabです
本来6脚(2脚ずつ120°ずつ違い)なので
1相目赤、2相目青、3相目黒にしました
見る分には十分邪魔です
前回の動画は左側の脚の動きが違ったので今回は直してあります
前回⇒
sm25288636
まとめ→
mylist/46778192
マイリスト→
mylist/46566765
3Dプリンタでテオ・ヤンセン機構⇒
sm24895164
シリーズ
前の動画はありません
次の動画はありません
もっと見る
フォローする
フォロー中
登録する
あとで見る
マイリスト
ニコニ広告
共有
アプリで視聴
技術・工作
ニコニコ技術部
投稿者コメント
テオヤンセン
リンク機構
プログラム
歩行
大車輪
タグ編集
タグを調べる